Controlling a robotic cart built with the ER1 robotics platform using a CEBL3 pie-menu P300 interface.
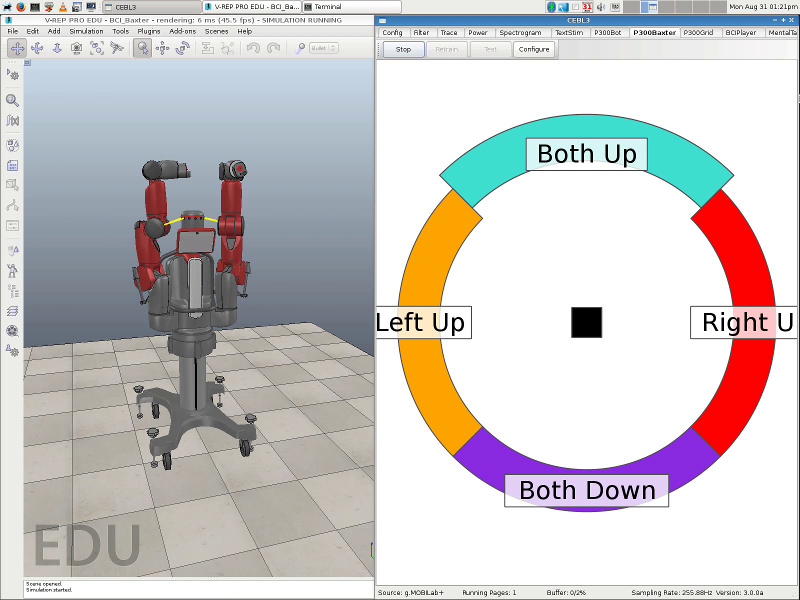
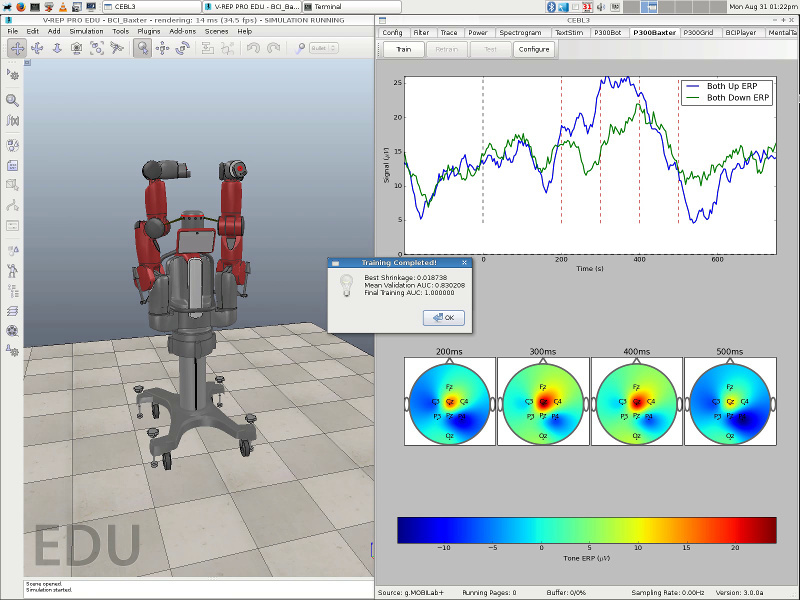
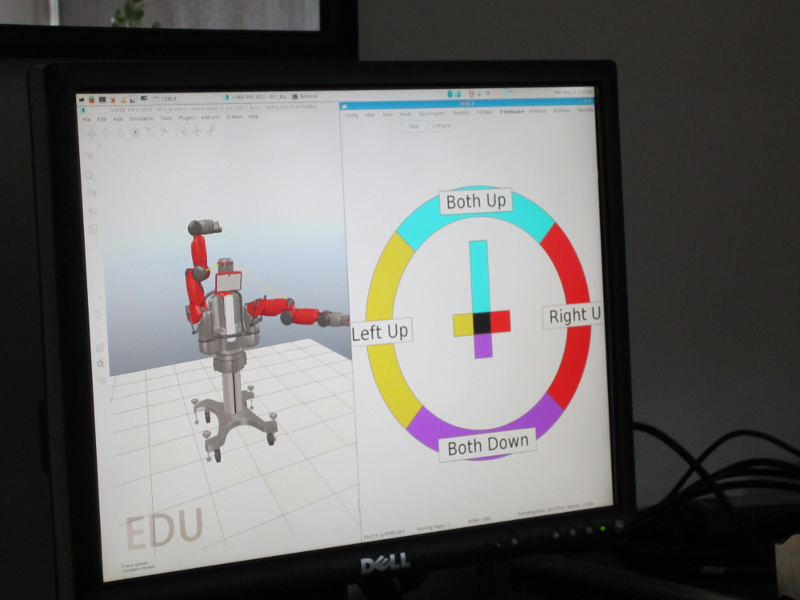
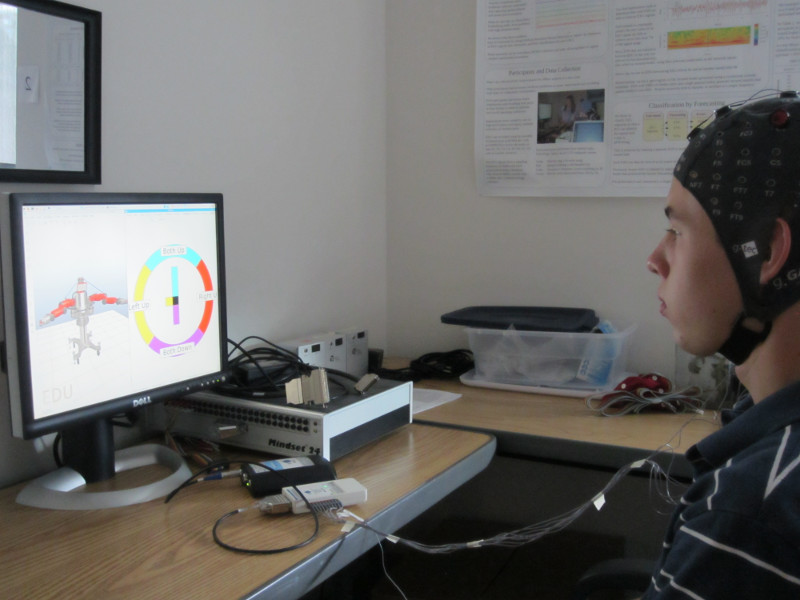
Calibration phase for the CEBL/Baxter interface.Training phase with typical P300 response.Virtual Baxter robot being controlled using CEBL3Controlling a virtual Baxter robot using CEBL3 and the g.tec g.MOBILab+ EEG cap.